Client overview
Our client is based in South Korea and provides data solutions to support software development in the autonomous vehicle industry. They supply annotated datasets to OEMs and technology providers, helping them train and validate Advanced Driver Assistance Systems (ADAS).
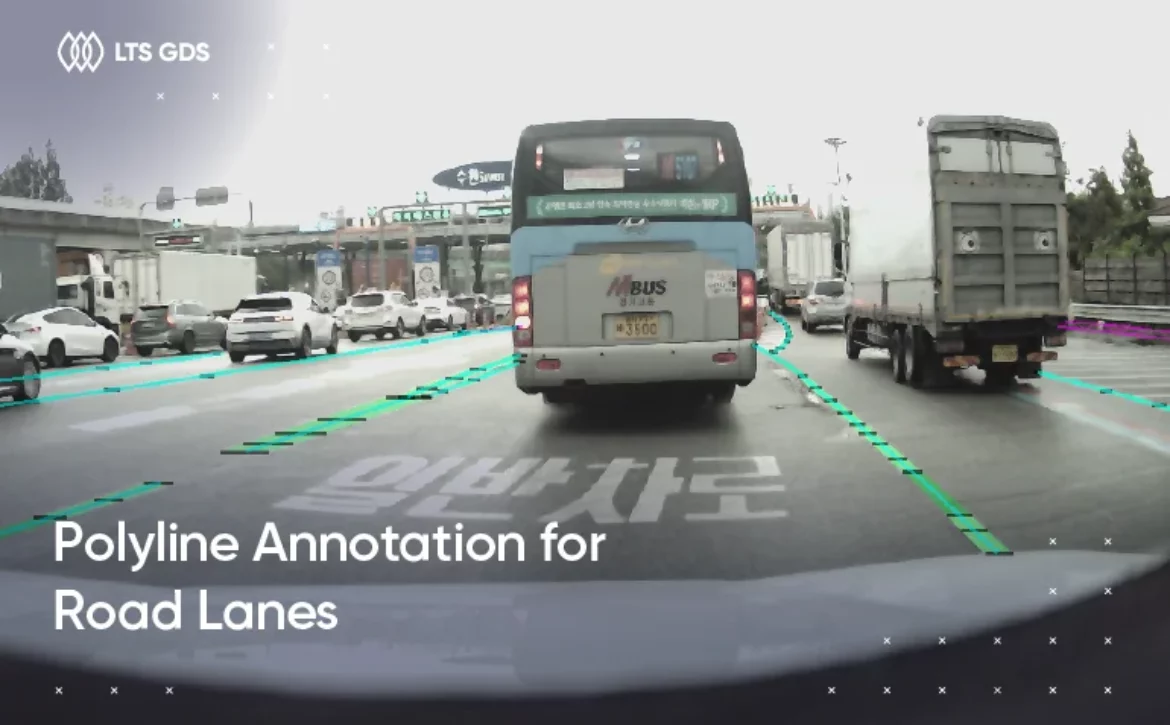
One of the key needs for ADAS is accurate understanding of road environments. Lane markings and road boundaries must be recognized precisely so systems can perform tasks like lane keeping, departure warnings, and safe navigation. The client requests us to help with large-scale annotation of these features using 3D images collected from various sources.
What the client needs
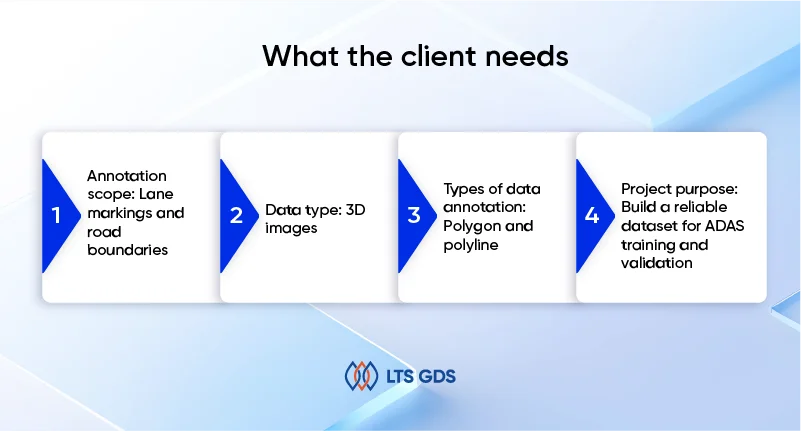
The client’s request focused on three main goals:
Annotation scope: Lane markings and road boundaries.
Data type: 3D images, captured with advanced sensors to provide spatial depth and perspective.
Types of data annotation: Polygon and polyline.
Project purpose: Build a reliable dataset for ADAS training and validation.
The challenges of this project is 3D image data which is more complex than 2D, requiring the higher quality infrastructure and experience. Road markings also differ by road type, and condition, meaning the dataset had to cover a wide range of scenarios while remaining consistent.
How we did it

With over 9 years of experience in data annotation for the autonomous vehicles industry, we follow the process strictly:
1. Requirements
At the start, our project manager worked with the client to clarify requirements for 3D image annotation. Together, we defined:
-Rules for different types of lane markings and road boundaries.
-Handling special cases such as overlapping lanes, faded paint, and perspective shifts in 3D views.
2. Pilot testing & agreement
We ran a pilot using a sample of 3D images. Annotators labeled lane markings and boundaries following the agreed-upon rules. The results were reviewed internally and with the client.
The pilot helped us refine guidelines for some complex cases. By the end of this phase, the client approved our approach, and we finalized the contract to scale up the project.
3. Training
We built a 30-member annotation team dedicated to this project. The selection focused on prior road surface annotation experience.
Training covered:
-Reading depth and perspective in 3D images.
-Best practices for polygon and polyline annotation.
-Managing difficult cases such as glare, nighttime scenes, or worn markings.
4. Project setup
We set up clear communication channels to keep the project on track. Slack and Gmail were used for daily updates, Excel for progress tracking, and the client’s own tool for annotation.
Regular check-ins were scheduled to review progress, address questions, and adapt to the latest project requirements. This framework kept both teams aligned throughout the 2.5-year collaboration.
5. Execution
Our annotation team followed a structured workflow:
-Use the client’s tool to annotate 3D images like lane markings and boundaries.
– Complete a self-check before submission.
-Apply QA process to ensure quality of annotated datasets.
Within the first month, accuracy reached over 96%, and steadily improved to 98% across a total of 220K+ annotated images.
6. Delivery
Deliveries were made in batches, each including annotated files, updated documentation, and QA reports. By project completion, the client received a full dataset with a consistent 98% accuracy rate, on schedule and ready for ADAS integration.
What the results have
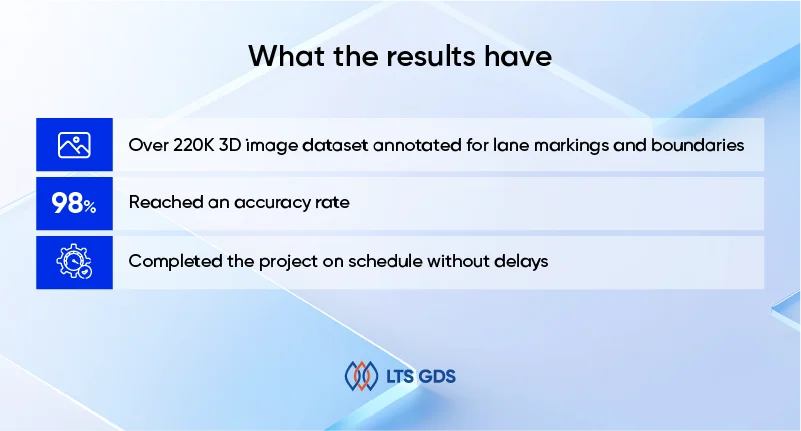
Our project’s result:
– Over 220K 3D image dataset annotated for lane markings and boundaries within 8 months.
– Reached an accuracy rate 98% for the entire project.
– Completed the project on schedule without delays and scaled up the annotation scope.